2 Préparation ŕ la mission
2.3 Les évolutions
2.3.5 Les AUV
Les AUV (Autonomous Underwater Vehicle) ou UUV
Unmanned Underwater Vehicles) sont des robots sous-marins
autonomes destinés ŕ effectuer des missions de courte ou
longue portée (surveillance d’un lac, d’une baie) ou de grande
portée (traversée de l’Océan Arctique ou Atlantique). Ils sont
destinés ŕ « recueillir des données de tous types : militaires,
océanographiques, environnementales, physico-chimiques …
Ces engins connaissent actuellement une phase de grand
développement rendu possible grâce ŕ l’évolution des
techniques grand public : batteries ŕ faible encombrement,
GPS, navigation, microélectronique, disques durs miniaturisés,
ordinateurs embarqués, télécoms…
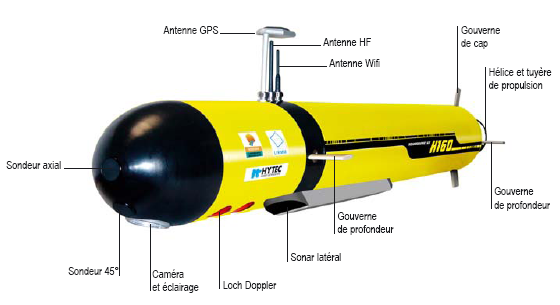
un exemple d'AUV: le H160 de la marque
Hytec
fiche technique du H160
Un AUV comporte quatre modules principaux : énergie et propulsion, navigation,communication et capteurs. Seul le dernier constitue la « charge utile ». La communication entre un AUV et son « commanditaire » s’effectue soit sous forme de lien acoustique(quand il est immergé) soit sous forme hertzienne (radio, satellite, wifi) lorsqu’il remonte en surface. La consommation énergétique reste la principale limitation de l’utilisation de ces engins.
Avantages
Du fait de leur autonomie, ces sonars possčdent un gros avantages par rapport aux autres sonars:
- On peut envoyer une machine lŕ oů l’on ne peut envoyer un homme: zone dangereuse (mines, pollutions …), zones inaccessibles ŕ l’homme :grands fonds (offshore profond)
- Le coűt d’exploitation ou d’exploration sera moindre en associant ŕ un navire de surface, plusieurs AUV couvrant, en parallčle, des zones adjacentes
